チャッキング時の検査対象物のばらつき抑制
・課題
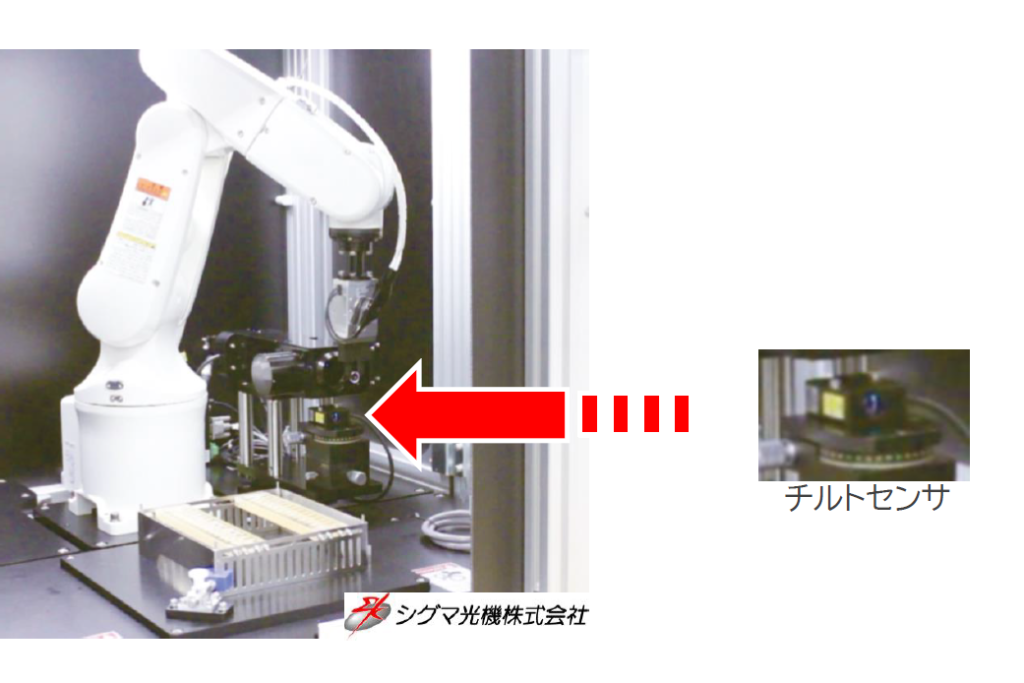
自動外観検査工程において、ロボットで検査対象物をチャッキングする。この時の姿勢ばらつきを改善したい。
・解決
検査対象物をチャッキングした姿勢(角度)や位置(フォーカス)をセンサで測定。そのデータをロボットにフィードバックすることで、安定した位置決めが可能。測定データによる位置決めは、画像によるオートフォーカス時間の短縮や、傾きを合わせることによる検査精度の向上にも繋がります。
SOLUTIONS
解決事例
・課題
自動外観検査工程において、ロボットで検査対象物をチャッキングする。この時の姿勢ばらつきを改善したい。
・解決
検査対象物をチャッキングした姿勢(角度)や位置(フォーカス)をセンサで測定。そのデータをロボットにフィードバックすることで、安定した位置決めが可能。測定データによる位置決めは、画像によるオートフォーカス時間の短縮や、傾きを合わせることによる検査精度の向上にも繋がります。


