Suppression of variation in inspected objects during robot chucking
・Issues
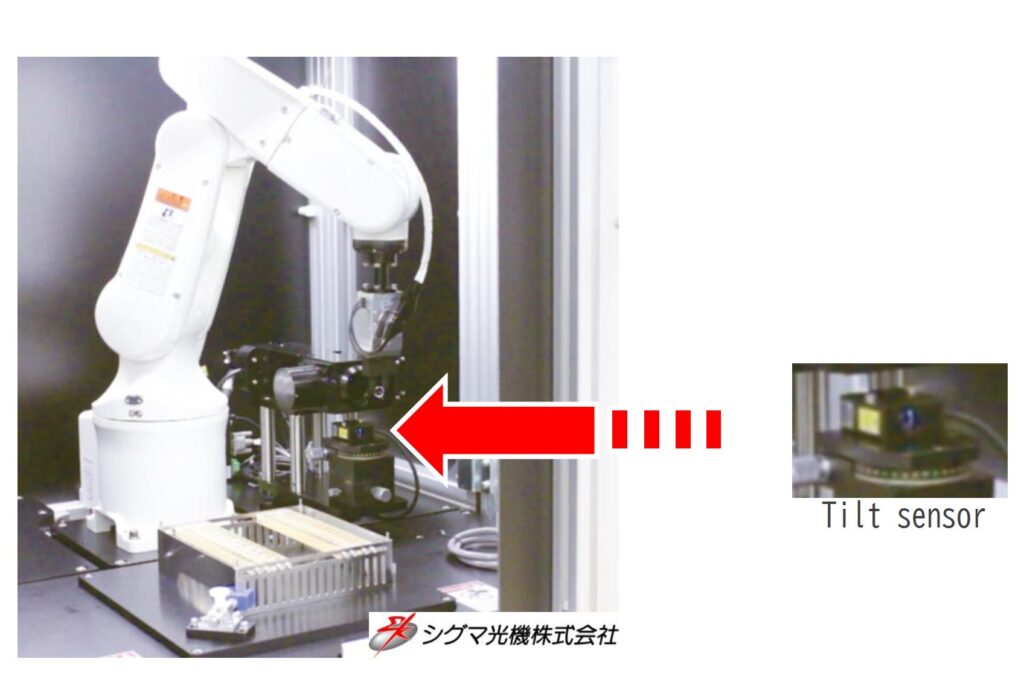
In an automatic visual inspection process, a robot chucks inspection objects. We would like to improve the posture variation during this process.
・Solutions
The posture (angle) and position (focus) of the chucked object to be inspected are measured by sensors. Data is fed back to the robot for stable positioning.
Positioning by measurement data also reduces autofocus time with images and improves inspection accuracy by matching the tilt.


